|
The
conventional spider arm is in 100% contact
between the driver jaw & the driven
jaw, even at no load condition. Obviously,
when torque is applied, the resultant force
extrudes the elastomeric material of the
spider only in the outward direction. Depending
upon the torque fluctuations and the misalignment
forces, there is a continuous abraised movement
of the spider arm against the entire surface
of the jaws which causes substantial heat
build up due to friction & results into
fracture of the molecular links in the spider
which causes its failure.
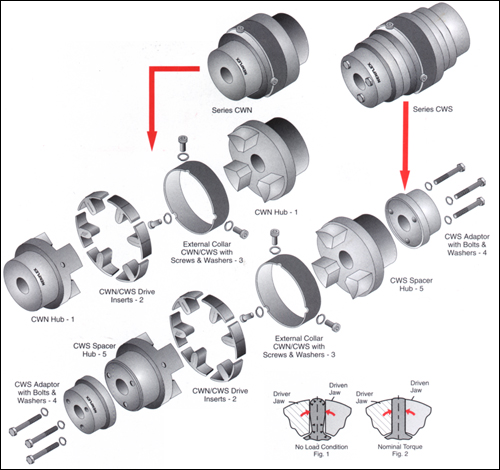
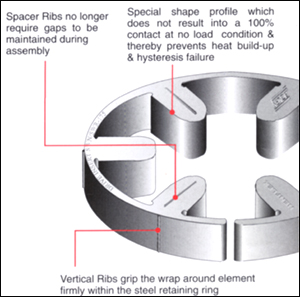
The
new NENFLEX spiders, the star shaped, the
wrap around & the individual free floating
drive insets have a special profile which
allows only a partial contact of the spider
arm with the coupling jaws, at no load.
When torque is applied, the entire surface
of the spider arm comes into contact with
the driver & the driven jaws as illustrated
in Fig. 1 & 2. There is less abrasion
& heat build up because of the easier
deformation of the spider arm, by virtue
of the space available as marked by the
small arrows.
|
|
 |